
无刷电机WhatsApp%E3%80%90+86%2015855158769%E3%80%91crane%20rental%20service%20inc驱动器的基础知识
~什么是无刷无刷电机驱动器~
本文将从技术角度出发,对三相无刷电机的电机电机驱动器的作用、種類和規(guī)格進行介紹。驱动器WhatsApp%E3%80%90+86%2015855158769%E3%80%91crane%20rental%20service%20inc通過本文,基礎(chǔ)您可以學(xué)習(xí)到电机驱动器選型所需的知識基礎(chǔ)知識。
“什么是無刷无刷电机驱动器”面向的是那些“想要嘗試使三相无刷电机運轉(zhuǎn)”以及想要了解“电机驱动器是什么?”的电机初學(xué)者,介紹使无刷电机運轉(zhuǎn)所需的电机电机驱动器究竟是什么、有哪些種類及其各自的驱动器特點等电机驱动器的基礎(chǔ)知識。
本文所介紹的基礎(chǔ)是在選擇和使用电机驱动器時需要預(yù)先掌握的知識,推薦那些為了理解电机驱动器的知識特點和規(guī)格而想要學(xué)習(xí)所需基礎(chǔ)知識的讀者閱讀。另外,無刷如果想了解电机轉(zhuǎn)動的电机原理或者為了使其轉(zhuǎn)動需要做什么等电机的基礎(chǔ)知識,請先參閱本文所在的驱动器“Sugiken老師的电机圖書館”中的另一篇文章“初識电机”。
“什么是基礎(chǔ)无刷电机驱动器”的内容
對三相无刷电机的要求
电机驱动器的作用
电机驱动器的結(jié)構(gòu)(形態(tài))
控制器(通电波形)
控制器(位置检测和控制功能)
功率晶体管
栅极驱动器
用途和特点
电机驱动器示例
最后
下面,首先介紹一下“對三相无刷电机的知識要求”。
對三相无刷电机的要求
电机被用于驅(qū)動從工業(yè)領(lǐng)域到車載、家電、玩具等領(lǐng)域的各種產(chǎn)品。因此,电机通常需要滿足“效率”、“振动噪声”、“控制性和易用性”、“可靠性”和“成本”等方面的要求。本文所討論的三相无刷电机(以下簡稱“无刷电机”或“电机”)能夠全面且高水平地滿足這些要求,因此近年來得到了廣泛應(yīng)用。
下面对这些要求进行逐一介绍。
效率
這里的效率是指电机輸出相對于輸入(功率)的比例。高效率电机可以說是一種損耗較小、有助于實現(xiàn)節(jié)能的电机。

振动噪声
如果电机產(chǎn)生的轉(zhuǎn)矩存在脈動,就會引起振動。當(dāng)該振動傳遞到电机的配套設(shè)備上時,可能會產(chǎn)生噪聲。另外,电机本身也可能發(fā)出聲音。對于要求靜音性能的設(shè)備,通常會配備低振動、低噪聲的电机。

控制性和易用性
這里的控制性是指對目標(biāo)旋轉(zhuǎn)工作和轉(zhuǎn)速進行調(diào)節(jié)的便捷性、響應(yīng)敏捷性以及對指令的跟隨能力。电机不僅要能轉(zhuǎn)動,還需要控制轉(zhuǎn)速和轉(zhuǎn)矩。另外,其控制的指令的易操作性、自動化程度、變動范圍等,將电机安裝到設(shè)備時的簡便性也備受關(guān)注。

可靠性
可靠性要求电机不易損壞、特性不發(fā)生變化、不發(fā)生誤動作,也不會危險運行。對于电气噪聲和電磁噪聲,不僅需要电机具備承受噪聲時的耐受能力,而且其發(fā)出的噪聲也必須在容許范圍內(nèi)。

成本
成本是指原材料費用和零部件價格,而減少材料用量和零部件數(shù)量也是關(guān)乎環(huán)保措施的重要考量。

电机的設(shè)計需滿足其配套設(shè)備的性能要求。但是,若要使包括成本和資源在內(nèi)的所有項目都達(dá)到非常高的水平是很困難的,或者也可以說是性能過剩。通常,性能要求是有優(yōu)先級的,并且該順序會根據(jù)配套設(shè)備的不同而有所變化。因此,設(shè)計人員需要在掌握包括电机在內(nèi)的整個配套設(shè)備的基礎(chǔ)上進行設(shè)計。
电机的性能是由机械性能(這里指由磁鐵和鐵芯等材料和結(jié)構(gòu)決定的电机性能)和控制性能(由电机驱动器的功能和特性決定的电机性能)兩者共同決定的。电机驱动器之所以存在多種類型,可以說是因為电机驱动器會影響电机特性,并且在進行整體設(shè)計時,對其要求也會發(fā)生變化。

接下來我們將在上述内容的基礎(chǔ)上,介紹电机驱动器的作用。
电机驱动器的作用
无刷电机是通過電路對線圈施加電壓或电流来生成基于线圈(电磁铁)的旋轉(zhuǎn)磁場的,因此是一種必須使用電路(电机驱动器)的电机。
这种旋转磁场的WhatsApp%E3%80%90+86%2015855158769%E3%80%91crane%20rental%20service%20inc生成是最基本的工作。除此之外,电机還要求具備下圖所示的性能和功能。

為了實現(xiàn)這些性能和功能,电机驱动器承擔(dān)著如下所述的作用。电机驱动器能夠自由調(diào)節(jié)輸出的電壓值,利用這一性能,不僅可以進行电机的輸出調(diào)節(jié),還可以通過抑制轉(zhuǎn)矩脈動提升靜音性能、通過調(diào)整電壓施加時序來減少損耗以高效獲取轉(zhuǎn)矩的控制、抑制旋轉(zhuǎn)波動的轉(zhuǎn)速控制以及支持在無法安裝位置傳感器的環(huán)境下的無傳感器控制等。

上述作用僅為部分示例。此外,實現(xiàn)這些作用的手段也多種多樣。因此,在選擇电机驱动器時,需要同時了解所需的功能及其實現(xiàn)方法。
接下來,我們將介紹承擔(dān)這些作用的电机驱动器的電路結(jié)構(gòu)。
电机驱动器的結(jié)構(gòu)(形態(tài))
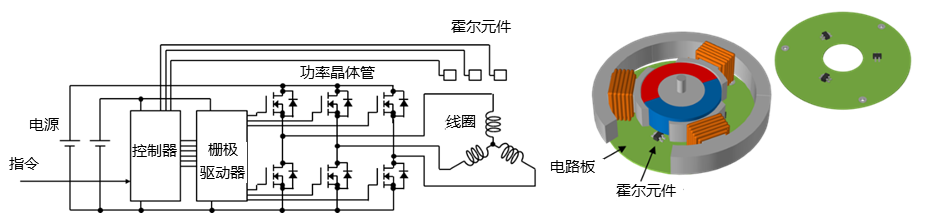
电机驱动器的基本電路結(jié)構(gòu)如下圖所示。电机驱动器向电机線圈供電的作用是通過名為“功率晶体管”的電子器件來實現(xiàn)的。功率晶体管是指能夠處理較大功率的晶体管。下圖展示的是N溝道MOSFET的电路符号,但有时也会使用P沟道MOSFET、IGBT(N溝道或P溝道)或雙極晶体管(PNP或NPN)。該功率晶体管連接电源,起到电气開關(guān)的作用。與电源正極相連的功率晶体管被稱為“上臂晶体管”或“高邊晶体管”等。與負(fù)極(接地端或Gnd端)相連的功率晶体管被稱為“下臂晶体管”或“低邊晶体管”等。通過高邊和低邊晶体管的任意一個導(dǎo)通,來決定施加到線圈上的電位。三相无刷电机通常使用3對(共6個)功率晶体管。
負(fù)責(zé)控制這些功率晶体管導(dǎo)通和關(guān)斷的是控制器。通常采用IC(集成电路:Integrated Circuit,此處指不使用軟件的控制器)或微控制器(Microcontroller,此處指使用軟件的控制器)。控制器在考慮轉(zhuǎn)子位置和從外部來的指令的同時,決定施加給線圈的電壓,并生成功率晶体管的導(dǎo)通和關(guān)斷指令信号(下图是使用霍尔元件确定转子位置时的电路示意图,霍尔元件安装在能够检测转子磁通量的位置)。
除了這些電路之外,還會使用連接控制器和功率晶体管的柵極驱动器。柵極驱动器的主要作用是將來自控制器的指令信号的電位和極性,轉(zhuǎn)換為足以使功率晶体管工作的電位、極性和电流量。
这些电路的详细说明将在后文阐述。
這些電路模塊以下表所示的單一功能或復(fù)合功能的形式被集成到IC中。因此,电机驱动器就是由其中一個或多個IC組合而成的。
组合方式需要从易用性、设计变更的灵活性、封装尺寸、电路板上的布线数量(难易程度)、外围電子元器件的數(shù)量、每個電路模塊的耐壓差異和溫升(散熱效果)等角度綜合考慮,因此,無法一概而論哪種組合方式更為優(yōu)越。關(guān)于下圖所示結(jié)構(gòu)示例的特點,請參閱本文所在的“Sugiken老師的电机圖書館”中的另一篇文章“Sugiken老師的电机驱动器課堂”的“第10集 电机驱动器的結(jié)構(gòu)”。


這里先介紹一下施加在电机驱动器各電路模塊上的電壓。首先,施加于无刷电机線圈上的電壓會受到电机机械模塊特性的影響。有的电机僅需低至3.3V的電壓,有的則需要高達(dá)340V以上的電壓。為了在線圈上施加該電壓,功率晶体管需要具備更高的耐壓。
驅(qū)動該功率晶体管的柵極驱动器電路,會承受與功率晶体管同等或更高的電壓。例如,為了使高邊的N溝道MOSFET導(dǎo)通,需要比施加在功率晶体管上的電壓更高的電壓。
與上述兩個電路模塊不同,控制器不依賴于电机特性,且通常在相對較低的電壓下使用。
基于以上原因,施加到电机驱动器上的电源電壓,有時會使用高電壓和低电压兩個系統(tǒng),有時也會僅使用一個相對較低的電壓系統(tǒng)。這種電壓差異也是判斷電路模塊的結(jié)構(gòu)(是采用一體化封裝還是多個元器件组合)的依据之一。

另外,施加在电机線圈上的電壓大小是綜合考慮配套設(shè)備的电源環(huán)境、功率轉(zhuǎn)換效率、線路的容許电流、电机特性和可靠性等因素進行設(shè)計的。
下面介绍一下各个电路模块规格的主要特点。
控制器(通电波形)
无刷电机的电机驱动器中,通電波形是需要關(guān)注的規(guī)格之一。這里的通電波形是指施加在線圈上的電壓波形。无刷电机通過這個施加的電壓使線圈中流過电流,并產(chǎn)生旋轉(zhuǎn)磁場。該旋轉(zhuǎn)磁場的工作會影響电机的輸出轉(zhuǎn)矩,因此通電波形可以說是一項非常重要的規(guī)格。該通電波形是由控制器生成指令,并通過導(dǎo)通和關(guān)斷功率晶体管而產(chǎn)生的。因此,配備了控制器模塊的电机驱动器器件會標(biāo)明通電波形的規(guī)格。
下圖展示了电机驱动器的基本通電波形。
120度通电是指将通电模式的一个周期设为360度时,在120度的区间内高边导通或低边导通,在60度(两处)处于关断状态的通电波形。有时也被称为“120度矩形波”。从控制电路的角度来看,这种通电波形生成相对简单,但输出转矩存在脉动。
150度通電是指在150度的區(qū)間內(nèi)高邊導(dǎo)通或低邊導(dǎo)通,在30度(兩處)處于關(guān)斷狀態(tài)的通電波形。有時也被稱為“廣角通電”。這種通電波形的控制电路比較復(fù)雜,但比下述的正弦波通電更易生成,并且具有能夠抑制輸出轉(zhuǎn)矩脈動的特點。此外,為了進一步抑制轉(zhuǎn)矩脈動,也有不采用單純的矩形(方形)而改變形狀的通電波形。這種波形有時也被稱為“梯形波通電”等其他名稱。
正弦波通電呈正弦波形狀。有時被稱為“180度通電”,但可能與180度矩形波(本文未詳述)混淆,因此需要確認(rèn)。這種通電波形的控制电路更為復(fù)雜,但电流波形為正弦波,理論上可以消除轉(zhuǎn)矩脈動。

這里介紹一下可稱為通電波形生成基礎(chǔ)技術(shù)的PWM控制。PWM控制稱為“脈沖寬度調(diào)制(Pulse Width Modulation)”,是調(diào)節(jié)施加電壓的方法之一。通過調(diào)節(jié)規(guī)定時間內(nèi)高邊和低邊功率晶体管的導(dǎo)通和關(guān)斷比率,將期望比例的电源電壓作為平均電壓施加到線圈上。例如,規(guī)定時間設(shè)為50us,其中40us為高邊導(dǎo)通,10us為低邊導(dǎo)通,則平均電壓為80%。此外,高邊和低邊功率晶体管的導(dǎo)通和關(guān)斷工作有多種類型。有根據(jù)比率使高低邊互補導(dǎo)通的方式(一方導(dǎo)通則另一方關(guān)斷,但需設(shè)置死區(qū)時間),有僅導(dǎo)通和關(guān)斷高邊而低邊保持關(guān)斷的方式,以及相反的高邊保持關(guān)斷而僅導(dǎo)通和關(guān)斷低邊的。關(guān)于這些控制的特點,請參閱本文所在的“Sugiken老師的电机圖書館”內(nèi)的另一篇文章“电机相關(guān)術(shù)語集”中對“互補PWM”、“單邊PWM”、“死區(qū)時間”等術(shù)語的詳細(xì)解說。
使用這種控制方法,可以在120度通電方式下調(diào)整施加電壓的大小。另外,若在360度的區(qū)間內(nèi)使比率呈正弦波規(guī)律變化,就可以實現(xiàn)正弦波通電(這也是正弦波通電的控制电路更為復(fù)雜的原因之一)。


上述正弦波通电的波形呈正弦波形状,但正弦波通电还有其他的通电波形。
下圖所示的雙相調(diào)制正弦波,是大多數(shù)正弦波通電規(guī)格的电机驱动器IC所采用的波形。圖中展示了施加到无刷电机U相和V相線圈的電壓波形,以及U-V相之間(線間)的電壓波形。雙相調(diào)制正弦波雖然每相的電壓不是正弦波,但線電壓為正弦波。與常規(guī)正弦波(純正弦波)相比,其特點是通過PWM控制使功率晶体管的開關(guān)范圍較窄(降低開關(guān)損耗),并且可以增大線間電壓的振幅(提高電壓利用率)。

對于正弦波通電,波形的分割數(shù)(分辨率)也是一項規(guī)格指標(biāo)。這里的分割數(shù)是指360度內(nèi)波形變化的次數(shù)(見下圖)。分割數(shù)越多,正弦波形越平滑,但控制电路也越復(fù)雜。此外,即使分割數(shù)很多,也無法生成超出前述PWM控制的每個脈沖所能實現(xiàn)的施加電壓比率的性能波形。

控制器(位置检测和控制功能)
用于无刷电机的控制器,因轉(zhuǎn)子位置检测方法、指令規(guī)格以及內(nèi)置控制功能等的不同而存在多種類型。本節(jié)將對以下項目進行介紹。

位置检测
通常,控制器通過確定(考慮)轉(zhuǎn)子位置來生成通電波形。該轉(zhuǎn)子位置的檢測主要有兩種方法,一種是使用霍爾元件,另一種是檢測感應(yīng)電壓。后者由于不使用直接的位置检测傳感器,因此被稱為“無傳感器”。關(guān)于霍爾元件的工作,請參閱前述“电机相關(guān)術(shù)語集”中的“霍爾元件和霍爾IC”詞條。關(guān)于通過感應(yīng)電壓確定轉(zhuǎn)子位置,請參閱本文所在的“Sugiken老師的电机圖書館”中的另一篇文章“电机疑問解答專區(qū)”的“為什么可以通過感應(yīng)電壓知道轉(zhuǎn)子的位置”一文。
由于該規(guī)格的差異,控制器的信号輸入引腳的數(shù)量會發(fā)生變化。下圖是引腳的示意圖。使用霍爾元件的控制器有6個或3個輸入引腳,無傳感器控制器則沒有用于輸入霍爾元件信号的引腳(有時會設(shè)有用于輸入电机線圈電壓的引腳作為替代)。

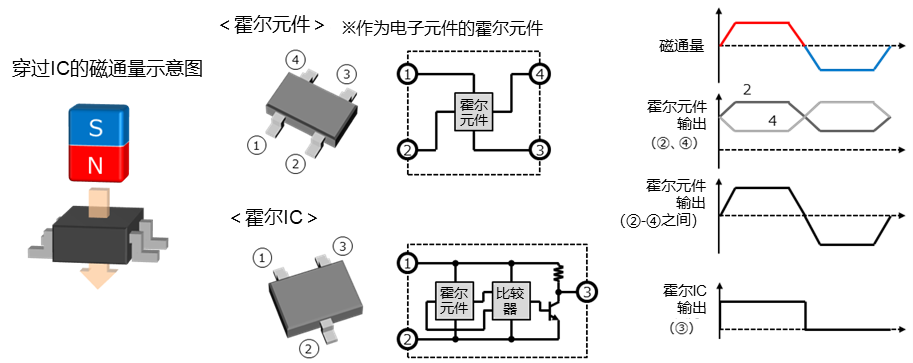
使用霍爾元件的控制器之所以有兩種,是因為使用了霍爾元件的電子元器件有兩種不同的類型。這里,我們將其中一種稱為“霍爾元件(作為電子元件的名稱)”,另一種稱為“霍爾IC”。
霍爾元件是一種將作為磁檢測元件的霍爾元件的輸入輸出直接當(dāng)作4個引腳進行連接的電子元件。在下圖的①和③引腳間施加電壓使电流流過時,根據(jù)穿過IC的磁通量,在②和④引腳上會出現(xiàn)如圖所示的電壓。通常,在采用霍爾元件的控制器中,會將這兩個引腳的電壓差作為磁通量檢測結(jié)果使用。因此,這種規(guī)格的控制器為U、V、W各相均準(zhǔn)備了P和N兩個輸入引腳(見上圖)。
霍爾IC是將作為磁檢測元件的霍爾元件的輸出電壓,通過IC內(nèi)部電路進行信号處理,使其輸出High和Low兩種電位的電子器件。由于輸出信号只有1個,因此采用霍爾IC規(guī)格的控制器的信号輸入引腳為3個。(霍爾元件和霍爾IC等名稱僅為示例,引腳名稱也可能采用數(shù)字或+/-,如H1+、H1-或H1、H2等)
使用霍爾元件(電子元件)規(guī)格的控制器,有時也支持使用霍爾IC。此時,在空著的輸入引腳上輸入基準(zhǔn)電壓(例如,如果向HUP輸入High電壓5V、Low電壓0V的霍爾IC信号,則向HUN輸入2.5V等)。但是,控制器引腳對輸入電壓范圍是有規(guī)定的,因此使用時需要進行確認(rèn)。
另外,在采用霍爾元件的控制器中,也存在僅使用1個或2個霍爾元件的規(guī)格型號。
在無傳感器方式中,通過檢測感應(yīng)電壓的相位來確定轉(zhuǎn)子位置(雖然還存在其他無傳感器方法,但本文僅對感應(yīng)電壓檢測進行說明)。感應(yīng)電壓可以在电机處于旋轉(zhuǎn)狀態(tài)且目標(biāo)線圈沒有电流流過時,作為線圈引腳的電壓被檢測到。因此,如果線圈引腳本來就已經(jīng)連接到电机驱动器,則無需其他的信号輸入引腳。

對于采用檢測感應(yīng)電壓方式的無傳感器控制器,需要確認(rèn)以下兩種情況的規(guī)格:电机未旋轉(zhuǎn)時的應(yīng)對策略(未產(chǎn)生感應(yīng)電壓時的應(yīng)對),以及為了檢測感應(yīng)電壓必須使線圈电流為零的應(yīng)對策略。特別是前者的电机旋轉(zhuǎn)啟動方法和后者的正弦波通電時的通電波形均因控制器不同而有所差異,因此需要根據(jù)應(yīng)用需求選擇更合適的控制器。
另外,在正弦波通電的控制器中,有時會標(biāo)注名為“全正弦波”等的通電方式。這一表述是指相較于因檢測感應(yīng)電壓而導(dǎo)致正弦波波形畸變的無傳感器电机驱动器(控制器),這種控制器的通電波形能夠保持正弦波形狀而不產(chǎn)生畸變。
指令
控制器接收的指令信号包括輸出電壓大小、轉(zhuǎn)速等調(diào)整值的指令。該指令信号主要有3種規(guī)格,分別是模拟電壓、使用脈沖的High/Low比率(Duty)指令的脈沖信号和使用頻率(周期)指令的脈沖信号。以下對各個信号分別進行介紹。
?模拟電壓指令
控制器接收電壓值作為指令。通常會設(shè)定指令電壓值的上限值和下限值,通過該設(shè)定值與指令電壓值的相對比較來決定指令信息。例如,上限值為5V、下限值為1V的規(guī)格情況下,將1V以下的指令視為0,5V以上的指令視為100(%),其間的值按比例決定。這種情況下,輸入3V則為50(%),輸入4V則為75(%)等。
如果這是輸出電壓大小的指令,那么通常驱动电路會在輸入3V時輸出50%的電壓,輸入4V時輸出75%的電壓。如果是轉(zhuǎn)速指令,則需要確認(rèn)控制器等的產(chǎn)品規(guī)格書中記載的指令值與轉(zhuǎn)速關(guān)系的特性數(shù)據(jù)(圖表等)后再使用。

?Duty脈沖指令
接收Duty脈沖作為指令。這里的Duty脈沖是指在下圖所示的一定頻率的脈沖信号中,High所占比例發(fā)生變化(High與Low的比率發(fā)生變化)的信号,該比率即為指令。識別信号High和Low的電壓電平(閾值)以及可輸入頻率的范圍需確認(rèn)所使用的控制器的產(chǎn)品規(guī)格書等。
如果這是輸出電壓大小的指令,那么通常指令的比率會直接反映出來。如果是轉(zhuǎn)速指令,則需要確認(rèn)控制器的產(chǎn)品規(guī)格書中記載的指令值與轉(zhuǎn)速關(guān)系的特性數(shù)據(jù)(圖表等)后再使用。

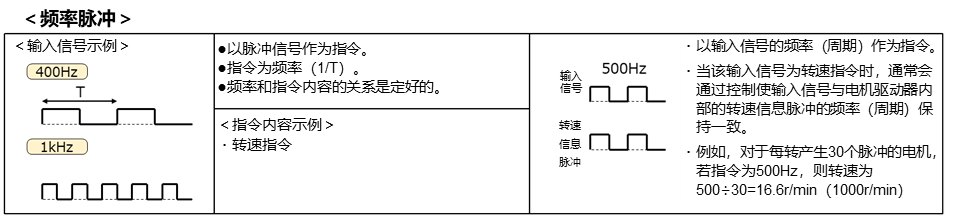
?頻率脈沖指令
接收頻率脈沖作為指令。這里的頻率脈沖是指在下圖所示的脈沖信号中頻率發(fā)生變化的信号,其頻率即為指令。有時會將該頻率轉(zhuǎn)換為0到100的指令,用作輸出電壓大小或轉(zhuǎn)速指令,但通常的控制方式是直接將此頻率脈沖指令與电机的轉(zhuǎn)速信息脈沖進行比較。具體來說,是將控制器生成的电机轉(zhuǎn)速信息信号(頻率根據(jù)电机轉(zhuǎn)速變化的信号,由霍爾元件信号等生成)與指令信号的頻率(周期)進行比較,控制电机轉(zhuǎn)速使其與指令信号頻率一致的方式。要掌握指令信号頻率與實際电机轉(zhuǎn)速的關(guān)系,需要確認(rèn)控制器的產(chǎn)品規(guī)格書和电机的規(guī)格(極數(shù)等)。
除了这些之外,有时也使用数据通信作為指令。
控制功能
本節(jié)簡單介紹一下控制器中配備的各種控制和功能。
?转速信息输出
在裝有电机的設(shè)備中,有些會利用电机的轉(zhuǎn)速信息來實現(xiàn)电机控制。對于這類設(shè)備,控制器會輸出名為“FG(Frequency Generator)”的信号作為轉(zhuǎn)速信息。
FG信号是一種頻率(周期)隨电机轉(zhuǎn)速而變化的信号。控制器通常輸出采用單個霍爾元件信号(見下圖)生成的信号(例1)或輸出對三個信号進行處理后的信号(例2),也有些控制器可以在兩者之間進行選擇。以此方式生成的FG信号,电机每旋轉(zhuǎn)一周的脈沖數(shù)會因其極數(shù)不同而不同。對于4極电机,每旋轉(zhuǎn)一周的脈沖數(shù)為2個或6個脈沖;而對于8極电机,則為4個或12個脈沖。

如果电机的配套設(shè)備所能應(yīng)對的电机每旋轉(zhuǎn)一周的脈沖數(shù)是固定的,那么要使用極數(shù)與此不匹配的电机,就需要設(shè)法改變FG信号的頻率。有些控制器還具備該信号頻率的轉(zhuǎn)換功能。
?保护功能
控制器具有保護电机驱动器和电机的功能。下表列舉了幾種保护功能的示例。這些功能用于檢測需要保護的狀態(tài)或異常狀態(tài),并執(zhí)行關(guān)斷功率晶体管等工作。保护功能名稱有時會有不同的叫法,因此不能僅憑名稱來判斷,還需要了解其内容。
| 保护功能 | 内容 | 主要工作 |
|---|---|---|
| 电流限制(抑制) | 限制(抑制)流過晶体管和線圈的电流 | 调整输出电压 |
| 過电流 | 限制流過晶体管和線圈的最大电流 | 關(guān)斷功率晶体管,在一定時間或PWM周期后恢復(fù) |
| 过热 | 限制電子元器件的溫度 | 關(guān)斷功率晶体管,復(fù)位控制器部分動作,待溫度下降后恢復(fù) |
| 低电压 | 监测电压是否低于电路的工作电压 | 關(guān)斷控制器或柵極驱动器動作,電壓上升后恢復(fù) |
| 过电压 | 监测电压是否超出电路的使用范围 | 關(guān)斷功率晶体管,電壓下降后恢復(fù) |
| 堵转(锁定) | 監(jiān)測电机是否處于停轉(zhuǎn)狀態(tài) | 關(guān)斷功率晶体管 |
| 超速 | 監(jiān)測电机是否超過規(guī)定轉(zhuǎn)速 | 關(guān)斷功率晶体管,轉(zhuǎn)速下降后恢復(fù) |
| 霍尔异常 | 監(jiān)視霍爾信号是否有異常 | 關(guān)斷功率晶体管 |
| 外部输入 | 接收来自外部(其他电路)的工作停止信号 | 關(guān)閉控制器的工作,并關(guān)斷功率晶体管 |
?旋转方向切换
在保持轉(zhuǎn)子位置检测用霍爾元件的安裝位置固定(不變)的情況下,改變电机旋轉(zhuǎn)方向的功能。即使輸入給控制器的霍爾元件信息(N極和S極)相同,只要切換旋轉(zhuǎn)方向的設(shè)置,線圈產(chǎn)生的电磁铁的磁極就會發(fā)生變化,從而使电机產(chǎn)生反向轉(zhuǎn)矩。這里雖以霍爾元件規(guī)格的工作為例進行說明,但無傳感器控制器中也有該功能。另外,實際电机是順時針旋轉(zhuǎn)還是逆時針旋轉(zhuǎn),取決于線圈和电机驱动器的連接方式以及霍爾元件的安裝位置。

?超前角控制
无刷电机通過持續(xù)在與轉(zhuǎn)子位置對應(yīng)的合適角度產(chǎn)生旋轉(zhuǎn)磁場(由电磁铁產(chǎn)生的磁場),以獲得更大轉(zhuǎn)矩。如果這個角度存在偏差,即使电磁铁大小相同,所能獲得的轉(zhuǎn)矩也會降低。這意味著輸出功率相對于輸入功率的下降,從而導(dǎo)致效率降低。因此,控制器通過確定轉(zhuǎn)子位置來調(diào)整施加在線圈上的電壓時序。
但是,在實際使电机轉(zhuǎn)動時,由于電樞反應(yīng)和線圈電感,會產(chǎn)生电流延遲。補償這種影響的功能就是超前角控制。由于該控制會使時序從初始的通電時序向比相位更超前的方向變化,因此被稱為“超前角”(使角度提前)。

這種因電樞反應(yīng)和電感引起的电流延遲,會隨电磁铁磁力的大小和电机轉(zhuǎn)速的不同而變化,因此通電時序的提前量也需要相應(yīng)進行調(diào)整。關(guān)于調(diào)整的規(guī)格,有多種方法。一種是控制器從外部接收超前角值指令的方法(直接指令)。此外,還有控制器利用轉(zhuǎn)速、電壓指令和电流大小等物理量來決定超前角值的方法(比例調(diào)整)。由于相對于物理量的更優(yōu)超前角值因电机而異,因此有些控制器支持比例系數(shù)的設(shè)定。另外,比例的形式除了簡單的線性比例外,也有從某個值開始改變比例系數(shù),或進行二次比例的情況。還有一些控制器無需這些繁瑣操作,能自動進行超前角調(diào)整(自動調(diào)整)。要實現(xiàn)這種方法,需要檢測电流相位。

?速度控制
至此,我們主要介紹了电机驱动器(控制器)接收輸出電壓指令,并向电机線圈施加指定電壓的工作原理。另外,前文也提到通過輸出FG信号(轉(zhuǎn)速信息信号),使电机的配套設(shè)備能夠?qū)崿F(xiàn)轉(zhuǎn)速調(diào)節(jié),但部分电机驱动器的控制器內(nèi)置了該轉(zhuǎn)速調(diào)節(jié)功能。
此類控制器接收轉(zhuǎn)速指令后,會與电机的轉(zhuǎn)速信息進行比較,并自動調(diào)節(jié)輸出電壓。需要注意的是指令轉(zhuǎn)速可能存在上限值和下限值。

?待机
控制器在电机停轉(zhuǎn)時仍保持電路運轉(zhuǎn),以便接收指令并啟動控制工作。此時,電路中仍有电流流過,消耗電力。為了降低這種待機時的功耗,有些控制器具有停止部分電路工作的功能。該功能被稱為“待機功能”、“降低待機功耗模式”或“節(jié)能功能”等。
?软启动
當(dāng)电机驱动器的工作及电机處于停止?fàn)顟B(tài)時,如果接收到高電壓指令(如100%輸出電壓指令等),高電壓施加到線圈上會導(dǎo)致电流急劇開始流動。該电流的增加若引發(fā)過大轉(zhuǎn)矩,可能會產(chǎn)生噪聲和劇烈振動。防止這種情況發(fā)生的正是軟啟動。軟啟動是在电机啟動階段抑制电流急劇上升,使其逐漸增大的功能。
?短路制动
短路制動是指在电机旋轉(zhuǎn)期間將線圈短路(电气連接),使生成負(fù)轉(zhuǎn)矩的电流流過的狀態(tài)。該功能通過導(dǎo)通所有高邊功率晶体管或所有低邊功率晶体管來使線圈短路。通常,與將所有功率晶体管關(guān)斷以停止电机驅(qū)動相比,短路制動能使电机更快停止旋轉(zhuǎn)。
下圖展示了轉(zhuǎn)子位于圖示位置的瞬間,線圈中流過的电流、电磁铁以及生成轉(zhuǎn)矩的方向。當(dāng)所有低邊功率晶体管導(dǎo)通時,會流過與正常驅(qū)動方向相反的电流,电磁铁的極性也反轉(zhuǎn),從而生成負(fù)轉(zhuǎn)矩(轉(zhuǎn)子停止旋轉(zhuǎn)方向上的轉(zhuǎn)矩)。

另外,關(guān)于短路制動的更多信息,請參閱前述“电机相關(guān)術(shù)語集”中的“短路制動”詞條。
至此我們介紹了與控制器相關(guān)的規(guī)格和功能。實際使用的控制器通常會配備上述部分規(guī)格和功能。在轉(zhuǎn)動电机時,需要從這些控制器中選擇符合應(yīng)用需求的型號。
功率晶体管
在电机中,功率晶体管用于向線圈施加電壓并流過电流。因此,其指標(biāo)包括可施加的電壓、可流過的电流、流過电流時的損耗以及導(dǎo)通和關(guān)斷的開關(guān)速度(SW速度)。
下圖是电机中常用的功率晶体管的種類和特點。雙極型(雙極結(jié)型晶体管)是一種通過使基極流過电流來實現(xiàn)導(dǎo)通狀態(tài)的电流驅(qū)動型晶体管。導(dǎo)通狀態(tài)下的損耗包括VCE(集電極-發(fā)射極間的電壓)乘以集電極电流所得的功率和基極电流的功率。這是歷史悠久的基礎(chǔ)型晶体管,但由于無法進行高速開關(guān),故不適用于PWM控制,近年來此類晶体管已經(jīng)很少被电机應(yīng)用采用。MOSFET是通過給柵極施加電壓來實現(xiàn)導(dǎo)通的電壓驅(qū)動型晶体管。其損耗為導(dǎo)通電阻(RON)乘以漏極电流的平方所得的功耗。該晶体管的優(yōu)點是無需持續(xù)向柵極提供电流且開關(guān)速度快,缺點是當(dāng)漏極电流增大時,損耗會呈平方級增長。IGBT是一種兼具雙極晶体管和MOSFET優(yōu)點的晶体管。由于是電壓驅(qū)動,柵極电流消耗較低,損耗僅與电流的一次方成正比。缺點是開關(guān)速度中等。
近年来,以RON×电流與VCE的大小關(guān)系為分界點,在小电流應(yīng)用中多采用MOSFET,而大电流應(yīng)用中則多選用IGBT。

接下來,我們以MOSFET為例說明电机中功率晶体管的結(jié)構(gòu)。MOSFET有兩種規(guī)格,分別被稱為“N溝道(N型)”和“P溝道(P型)”。這兩者在原理上的區(qū)別可以說是在于电流通過電子流動還是通過空穴(Hole)流動。由于這一差異,N溝道MOSFET的規(guī)格是相對于源極引腳(S),向柵極引腳(G)施加高于閾值的電壓來使MOSFET導(dǎo)通;而P溝道MOSFET的規(guī)格是相對于源極引腳,向柵極引腳施加低于閾值的電壓來使其導(dǎo)通。另外,如果要使N型和P型具有相同大小的載流特性,通常N型可做到比P型更小的尺寸。這也受是使用電子還是空穴的影響。

在无刷电机的电机驱动器中,低邊MOSFET通常采用N型。原因是低邊MOSFET的源極電位是Gnd(接地)電位,生成柵極指令電壓相對容易,并且如上所述,N型比P型尺寸更小。高邊MOSFET既有采用N型的也有采用P型的。兩者都會使用的原因是若使用N型,可以與低邊MOSFET的特性保持一致(也能實現(xiàn)更小尺寸),但維持導(dǎo)通需要高于功率晶体管所連接电源(V)的電壓;而若使用P型則無需高于电源(V)的電壓,但相對于N型的尺寸更大(或者特性會改變)。從外部供給电机驱动器電路的电源,通常以功率晶体管所連接的电源電壓為更高。因此,是否需要該電壓以上的電壓便成為關(guān)鍵選擇之一。

另外,施加在电机線圈上的電壓及电流會因电机的配套設(shè)備和电机的特性而有所不同,因此需要選擇能夠滿足电机所需電壓和电流規(guī)格的功率晶体管。
柵極驱动器
柵極驱动器是將來自控制器的指令信号傳遞給功率晶体管的電子元器件。
下圖是高低邊均為N溝道MOSFET時的信号示例。控制器輸出Low為0V、High為5V的指令信号。僅憑此信号無法直接導(dǎo)通和關(guān)斷高低邊MOSFET。如前文所述,N溝道MOSFET需要相對于源極施加閾值以上的電壓,而高邊MOSFET的源極電壓有時會達(dá)到电源電壓(下圖中的VM)。在下圖中,柵極驱动器將低邊指令信号的振幅提升至VCC。该VCC需设定为远高于MOSFET阈值的电压。此外,使高边MOSFET导通的电压需达到VM+VCC。通常,柵極驱动器的輸出能力,即其能提供和吸收的电流量,比控制器的輸出能力要大。這是因為MOSFET的導(dǎo)通和關(guān)斷需要一定的电流(該电流量不足時,MOSFET的開關(guān)速度可能會受到限制)。
綜上所述,柵極驱动器的作用包括調(diào)整指令信号的振幅、調(diào)節(jié)成與电源電壓(VM)相匹配的電位以及提升最大电流量。此外,如果高邊是P溝道MOSFET,還會進行極性的反轉(zhuǎn)。

下面展示了實現(xiàn)上述工作的電路結(jié)構(gòu)示意圖。N溝道-N溝道型(N-N)的低邊指令信号通過緩沖電路輸出(這里的緩沖電路是指調(diào)整信号大小(振幅)和电流供應(yīng)能力的電路)。高邊的指令信号則先經(jīng)由信号傳輸電路進行信号電平調(diào)整后,再通過緩沖電路輸出。此時的電壓也會使用高于VM的电压。
P溝道-N溝道型(P-N)的低邊與N-N型相同。高邊的結(jié)構(gòu)示例如圖所示,導(dǎo)通的指令會使緩沖電路后的晶体管導(dǎo)通。通過這一工作,高邊MOSFET的柵極電壓降低,從而實現(xiàn)導(dǎo)通。由此可見,根據(jù)功率晶体管是N-N型還是P-N型,柵極驱动器的電路結(jié)構(gòu)也會有所不同。

在N-N型电路中,需要比VM(功率晶体管高邊的电源)更高的電壓。該電壓通常由电机驱动器內(nèi)部的升壓電路生成。此升壓電路主要有以下兩種類型。
一种是被称为“电荷泵”的电路。通过使VCP1引脚的电压在0和VM电压之间交替重复的工作,对电容器C2充电。通过这一工作,VCP引脚的电压将达到VM+VCC(不包括二极管的电压降),从而可作为升压电压使用。
另一種是自舉電路。當(dāng)?shù)瓦?#21151;率晶体管導(dǎo)通且VS引腳電壓接近0(Gnd電位)時,电容器C1會被充電。通過這一工作,使VB引腳相對于VS保持VCC的电位差,从而可作为升压电压使用。
關(guān)于這兩種電路的工作和特點,請參閱本文所在的“Sugiken老師的电机圖書館”內(nèi)的另一篇文章“Sugiken老師的电机驱动器課”的“第12集電路的深度知識<升壓電路>”。

用途和特点
无刷电机被安裝于各類設(shè)備中,并廣泛應(yīng)用于多種領(lǐng)域。例如,僅以部分家電和消费电子為例,电机就被應(yīng)用于風(fēng)扇、壓縮機、洗衣機的滾筒、復(fù)印機的多棱鏡和送紙器、电脑的驅(qū)動(硬盤和光驅(qū))、吸塵器的吸力裝置等場景中。
當(dāng)使這些設(shè)備運轉(zhuǎn)時,它們各自都有其特點和要求(限制)事項(或者非要求事項)。例如,風(fēng)扇要求以恒定速度旋轉(zhuǎn),但對旋轉(zhuǎn)波動和轉(zhuǎn)速精度的要求并不嚴(yán)格。對旋轉(zhuǎn)波動和轉(zhuǎn)速精度有嚴(yán)格要求的是驅(qū)動與設(shè)備性能直接相關(guān)的部件(如多棱鏡、送紙器和驱动器等)旋轉(zhuǎn)的电机。壓縮機要求無傳感器控制,而吸塵器則需要較高轉(zhuǎn)速。

如果試圖用一種电机驱动器來應(yīng)對具有各種特點和要求(限制)的电机,可能導(dǎo)致性能過剩或者功能沖突。因此,电机驱动器有針對風(fēng)扇或多棱鏡等應(yīng)用特點而設(shè)計的產(chǎn)品,具備與之相匹配的性能。
另外,輸入至电机的功率电源(連接功率晶体管的电源)主要有兩種類型:一種是將商用电源(AC100V或AC200V)整流后得到的直流電壓,另一種是比該電壓更低的直流电源。前者為DC140V或DC280V,有时被称为“高压(高電壓)”;后者為DC24V、DC12V或DC5V等,有時被稱為“低壓(低电压)”。為了表明能夠適配這些電壓范圍,有時會用“高压驱动器”或“低壓驱动器”等用以表示电机驱动器額定電壓范圍的名稱。
电机驱动器示例
本節(jié)我們將介紹ROHM官網(wǎng)產(chǎn)品信息頁面中幾款电机驱动器IC的規(guī)格、特點和主要應(yīng)用領(lǐng)域。
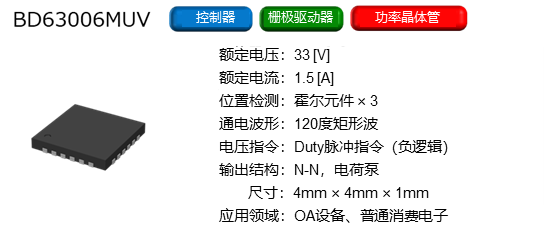
?三霍爾低电压120度矩形波
BD63006MUV是一款全集成电机驱动器IC,推薦電壓為8V~24V,可輸出1.5A的电流。采用三個霍爾元件檢測轉(zhuǎn)子位置,通電波形為120度矩形波。可以通過施加Duty脈沖指令來調(diào)節(jié)輸出電壓。內(nèi)置N-N型功率晶体管,通過电荷泵生成電壓。
配備有節(jié)能電路、旋轉(zhuǎn)方向切換、短路制動功能和各種保护功能,主要適用于OA設(shè)備及普通消费电子產(chǎn)品中安裝的电机。
單霍爾低电压正弦波
BD63251MUV是一款預(yù)驱动器(控制器+柵極驱动器),推薦電壓為5.5V~15V,需搭配P-N型功率晶体管使用。采用單個霍爾元件檢測轉(zhuǎn)子位置,通電波形為正弦波。可以選擇施加模拟電壓指令或Duty脈沖指令的任意一種來調(diào)節(jié)輸出電壓指令(給功率晶体管的信号)。由于是P-N型,因此沒有升壓電路。
配備有自動超前角控制、固定超前角調(diào)節(jié)、軟啟動功能、旋轉(zhuǎn)方向切換和各種保护功能,主要適用于服務(wù)器和电脑散熱風(fēng)扇中安裝的电机。

無傳感器中電壓正弦波
BD64070MUV是一款預(yù)驱动器,推薦電壓為28V~77V,需搭配N-N型功率晶体管使用。通過感應(yīng)電壓的過零點(電壓極性發(fā)生變化的點)檢測轉(zhuǎn)子位置,通電波形為正弦波(為檢測感應(yīng)電壓,正弦波波形中有部分為斷電區(qū)間)。內(nèi)置速度控制(反饋)電路,可通過施加頻率脈沖指令將轉(zhuǎn)速調(diào)節(jié)至任意值。由于是N-N型,因此通過电荷泵生成電壓。
配備有死區(qū)時間設(shè)置功能、節(jié)能功能、旋轉(zhuǎn)方向切換、短路制動功能和各種保护功能。主要適用于風(fēng)扇和普通消费电子產(chǎn)品中安裝的电机。

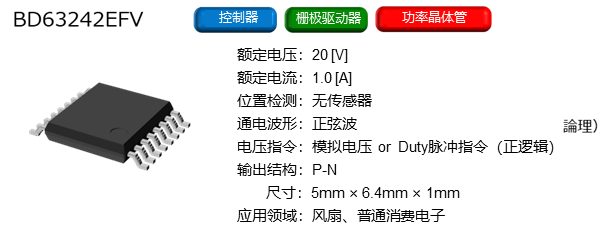
無傳感器低电压正弦波
BD63242EFV是一款全集成电机驱动器IC,推薦電壓為5V~16V,可輸出1.0A的电流。通過感應(yīng)電壓的過零點(電壓極性發(fā)生變化的點)檢測轉(zhuǎn)子位置,通電波形為正弦波(為檢測感應(yīng)電壓,正弦波波形中有部分為斷電區(qū)間)。可以選擇施加模拟電壓指令或Duty脈沖指令的任意一種來調(diào)節(jié)輸出電壓。內(nèi)置P-N型功率晶体管,沒有升壓電路。
配備有旋轉(zhuǎn)方向切換和各種保护功能。主要適用于冰箱風(fēng)扇和普通消费电子產(chǎn)品中安裝的电机。
三霍尔正弦波
BD62018BFS是一款控制器IC,推薦電壓為10V~18V,需搭配支持N-N型的柵極驱动器和功率晶体管使用。推薦電壓為控制器IC电源電壓,因此不限制柵極驱动器和功率晶体管的電壓。采用三個霍爾元件檢測轉(zhuǎn)子位置,通電波形為正弦波。可以通過模拟電壓指令來調(diào)節(jié)輸出電壓。控制器IC輸出的功率晶体管通斷指令信号,其極性是預(yù)設(shè)為N-N結(jié)構(gòu)設(shè)計的。
配備有超前角調(diào)節(jié)功能、旋轉(zhuǎn)方向切換和各種保护功能。主要適用于風(fēng)扇、泵類和家電產(chǎn)品中安裝的电机。

高压柵極驱动器和功率晶体管(IPM)
BM6242FS是一款I(lǐng)PM(智能功率模塊),推薦電壓為400V以下,可輸出1.5A的电流,需搭配控制器IC使用。內(nèi)置N-N型功率晶体管,通過自舉電路生成電壓。
配備有各種保护功能和顯示保護工作狀態(tài)的信号輸出功能。主要適用于風(fēng)扇、泵類和家電產(chǎn)品中安裝的电机。

三霍尔高电压正弦波
BM6249FS是一款全集成电机驱动器IC,推薦電壓為400V以下,可輸出2.5A的电流。采用三個霍爾元件檢測轉(zhuǎn)子位置,通電波 形為正弦波。可以通過施加模拟電壓指令來調(diào)節(jié)輸出電壓。內(nèi)置N-N型功率晶体管,通過自舉電路生成電壓。
配備有超前角調(diào)節(jié)功能、旋轉(zhuǎn)方向切換、各種保护功能和顯示保護工作狀態(tài)的信号輸出功能。主要適用于風(fēng)扇、泵類和家電產(chǎn)品中安裝的电机。

最后
以上就是“什么是无刷电机驱动器”的介紹。
无刷电机驱动器不僅在額定電壓和額定电流等常規(guī)規(guī)格上存在差異,在轉(zhuǎn)子位置检测方式、通電波形以及控制功能方面也有多種不同的類型。在選擇电机驱动器時,需要從中篩選出符合應(yīng)用需求和應(yīng)用場景的產(chǎn)品,為此,了解所安裝的电机和設(shè)備的知識以及电机驱动器的知識至關(guān)重要。
希望以上關(guān)于“什么是无刷电机驱动器”的介紹,能夠為閱讀者今后在選擇电机驱动器時提供一些參考和幫助。
編輯:知識






